How It All Started
It started with a question we kept asking in the lab: "Why are restaurant drink dispensers so clunky?" You press a lever, you touch a button, you hold a cup at an awkward angle — and half the time you overfill and spill. We thought: what if the machine just knew what you wanted and poured it for you, hands-free?
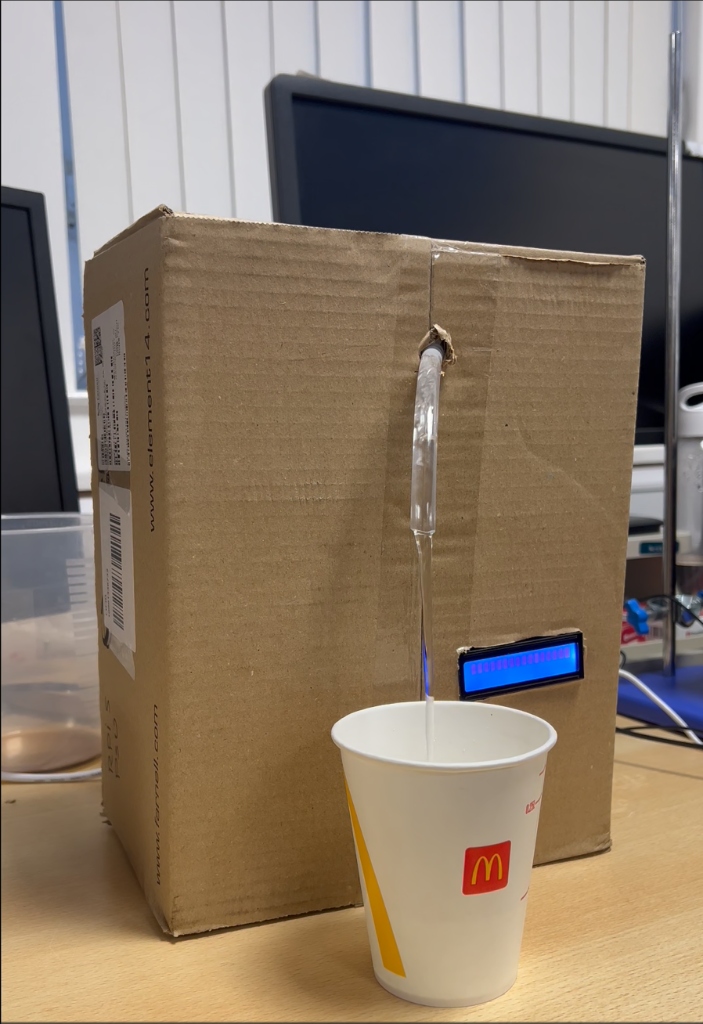
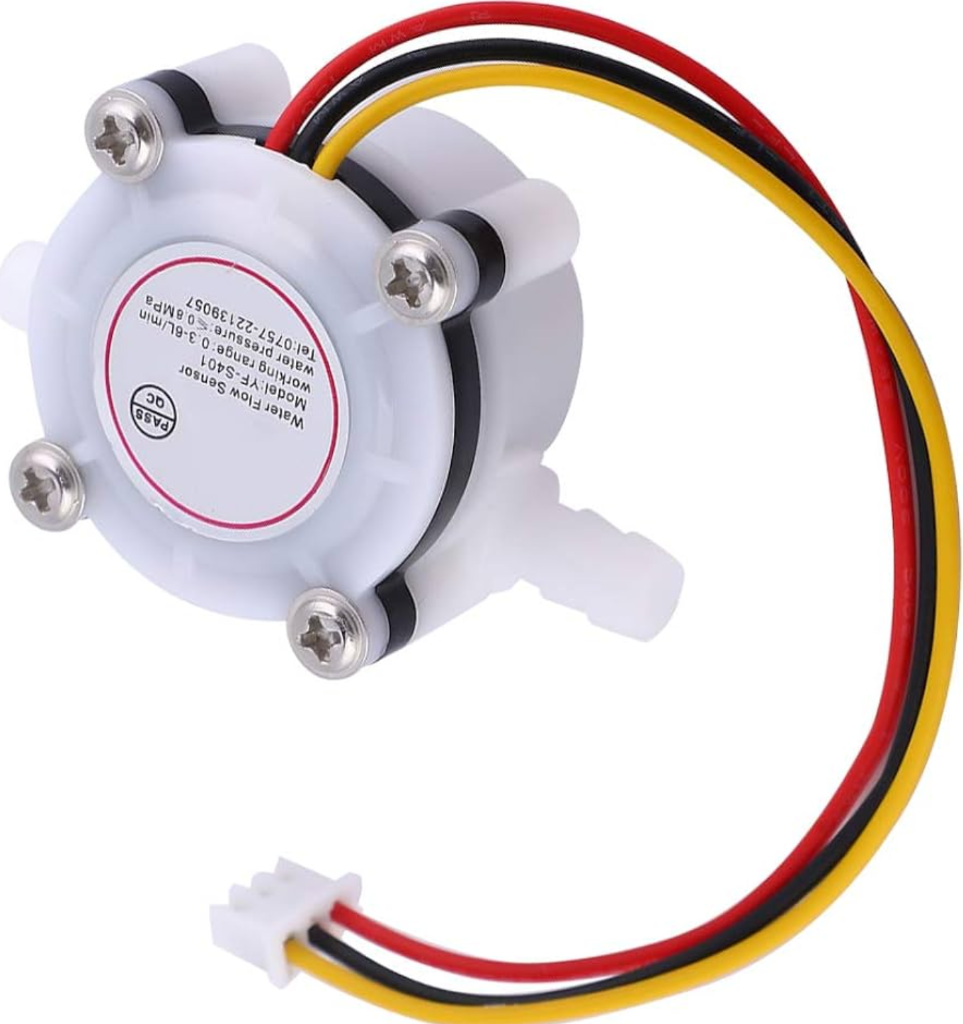
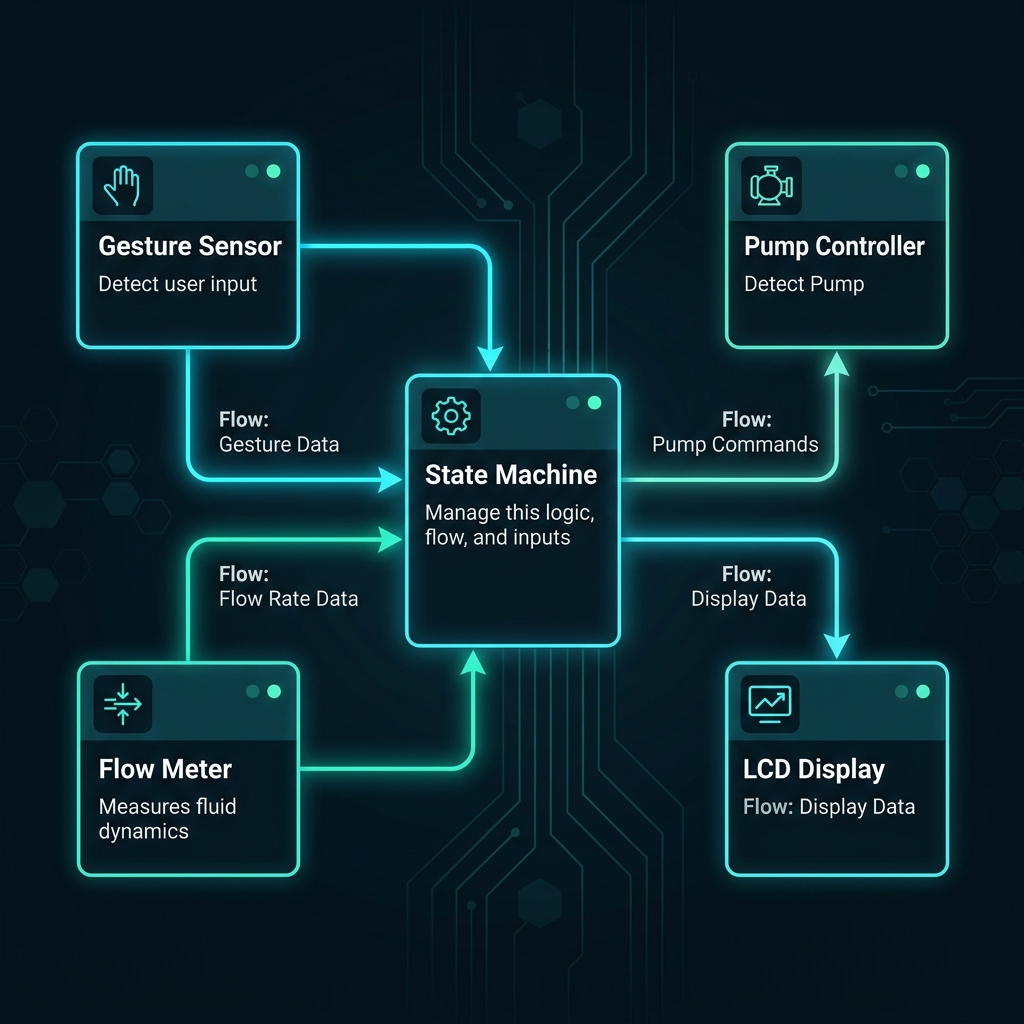
That idea became Aquaflow. Pick a cup size with a button, place your cup on the platform, an IR proximity sensor sees it, the pump fires, the flow sensor counts every millilitre, and the pour stops the instant it hits target. No touching. No spillage. Just precision.
What made it exciting wasn't water coming out of a tube — it was doing it properly: interrupt-driven I/O, a real state machine, SOLID architecture, code that survives a professional review.
Built over the spring semester in Rankine Lab 509 at the University of Glasgow — from bare wires on a breadboard to a 3D-printed enclosure with an integrated sensor mount.